
Students use this pre-built LabVIEW VI for modeling the QNET DC Motor
1
Modeling DC Motor Control
This is lab 1 of 6 in the course
by Quanser Inc.
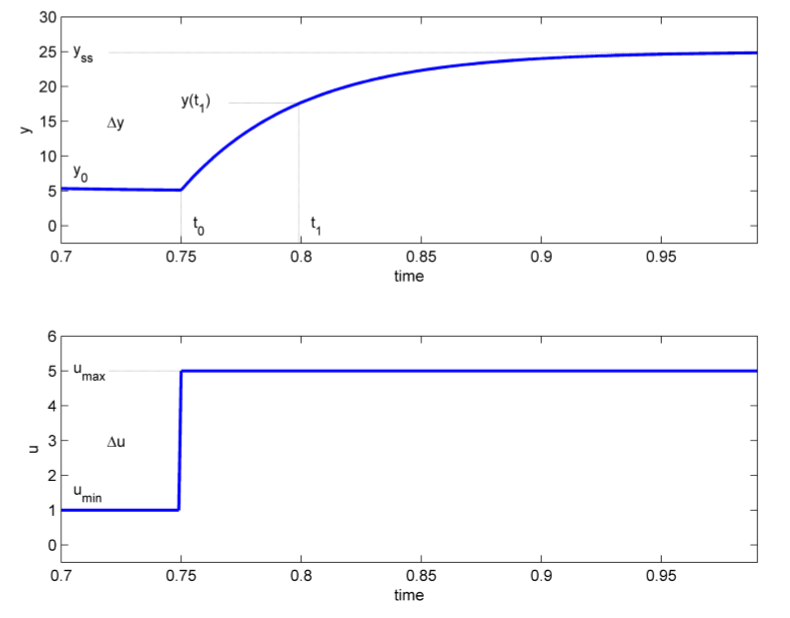
This lab introduces students to using transfer functions to create models for how a DC motor behaves. In addition, they run open-loop feedback control with a virtual instrument to validate the DC motor model. This lab gives basic insight into parameters that define the motor so the student can later accurately control speed and position.