NI電気モータシミュレーションツールキットを使用した電気モータの高精度シミュレーション
概要
最新技術を利用した高精度のリアルタイム電気モータシミュレーションを行えば、実機なら破壊の恐れがあるような、実際のシステムでは実行が困難または不可能な過度や不具合テストが実現できます。極めて精度の高い物理システムモデルを使用すると、コントローラは、厄介なケースでも安全かつ安定して制御を正しく行っているかを確認することができます。
ナショナルインスツルメンツのHILプラットフォームを使用すれば、テスト実行用の拡張可能なオープンプラットフォームで、最高精度のリアルタイムシミュレーションを実現することができます。さらに、開発プロセスの早い段階で問題を発見し性能を最適化できるため、組込ソフトウェアの検証に必要なフィールドテストの量も減らすことが可能です。その結果、製品の市場投入までの期間が短縮されるほか、開発効率も向上します。
内容
テストの難題
電気駆動のエンジン制御装置(ECU)用制御入出力は、内燃エンジンのパワートレインECUの制御入出力に比べはるかに高速です。電気モータシステムの制御に使用されるより高速のデジタルスイッチ信号の場合、従来方式のHILテストでは十分に対応することができません。図1は、シミュレーションの時間ステップが長くなるのに応じて、2kHzと8kHzのパルス幅変調(PWM)信号へのシミュレーション応答における相対誤差が上昇する様子を示しています。
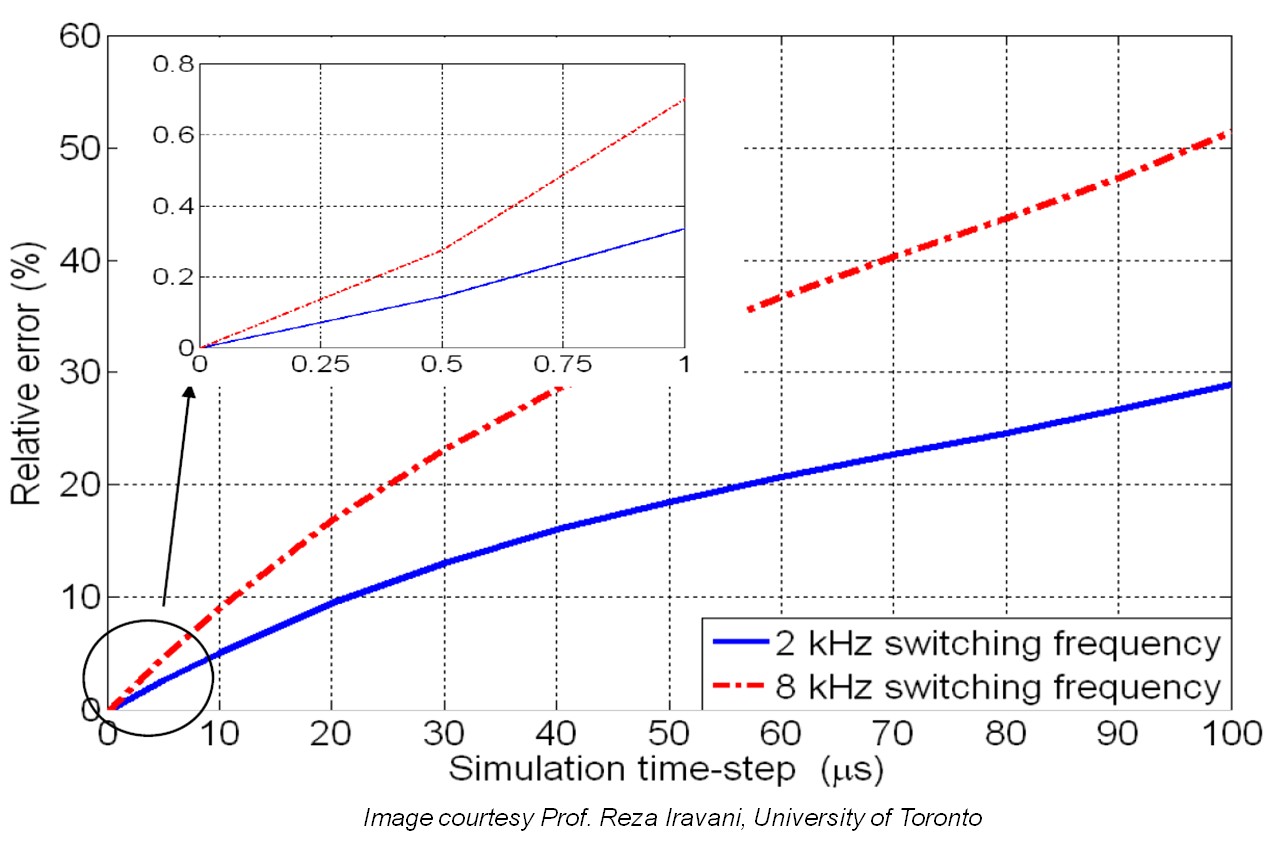
図1. 基準周波数が2kHzまたは8kHzのPWM信号に応じたパワーエレクトロニクスシステムの相対シミュレーション誤差
このグラフから、25 µ秒周期のシミュレーションループの場合、8kHz PWMへのシミュレーション応答では、シミュレーションの時間分解能によって誘発された20%の相対誤差が生じていることがわかります。小さい方のグラフは、マイクロ秒以下の範囲の誤差を拡大したもので、1 µ秒で実行する同じシミュレーションではPWM計測の誤差がわずか0.75%だったことがわかります。
さらに複雑なことに、電気モータは、磁気飽和やコギングトルクなど直接モデリングするのが難しい複雑な非線形動作を示します。ECUは基本機能なら線形モデルで十分テストすることができますが、厳密なテスト、調整、最適化のためには、より複雑な動作のモデリングが必要となります。
図2は、電力システムテストの3つのステージを示しています。システム全体をシミュレーションして電子制御をテストする信号レベルテスト、モータエミュレータを使用して制御システムとパワーエレクトロニクスの両方をフルにテストするパワーレベルテスト、メカニカル/ダイナモメータテストの3つです。従来型のシミュレーションシステムでは、テスト能力に限界があったため、制御システムの設計者は高価なダイナモメータやフィールドテストを採用するしかありませんでした。ただしシミュレーション速度と精度の向上により、信号/パワーレベルでより多くのテストが可能となり、物理テスト段階にかかる時間とコストが削減できるようになりました。
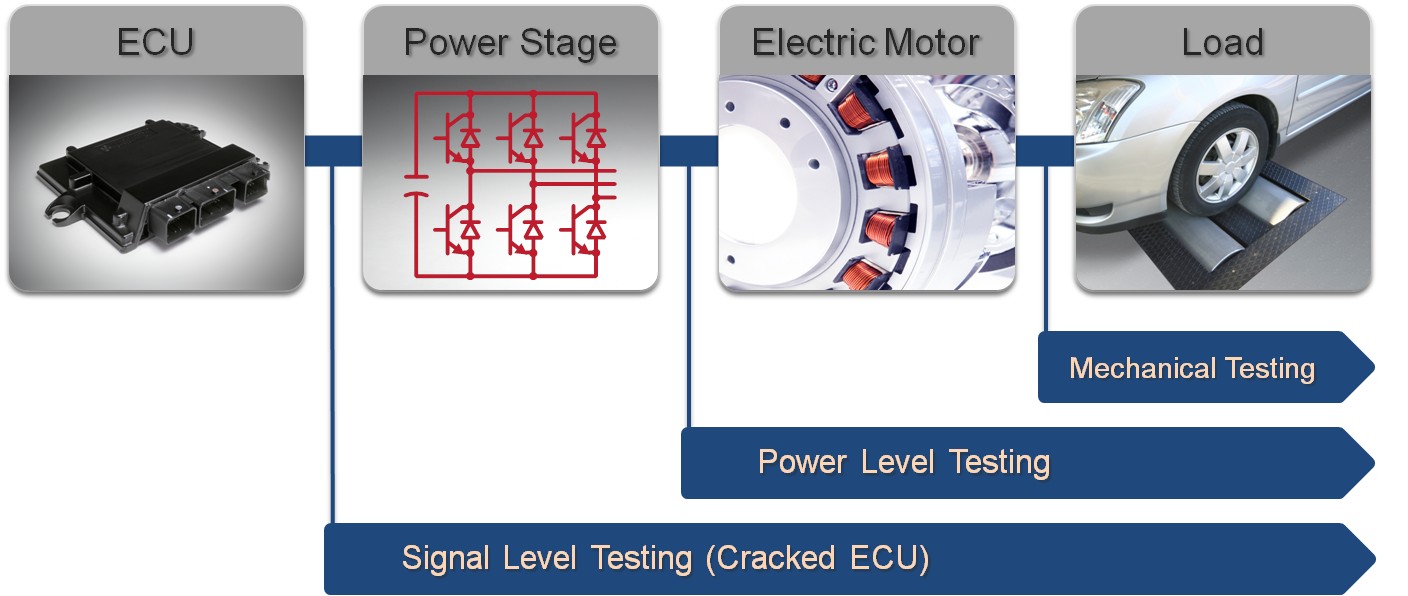
図2. 電気モータの制御システムテストの3段階: 信号レベルテスト、パワーレベルテスト、メカニカルテスト
アプローチ
シミュレーション周期で1 µ秒に到達するには、電気モータとパワーエレクトロニクスのHILテストシステムにおけるパラダイムシフトが必要です。そのような高速でのシステムシミュレーションを可能にしたのが、プロセッサに基づいた従来型のHILシステムからFPGA(field-programmable gate array)ベースのシミュレータへのシフトでした。
プロセッサベースの従来型HILシステムは、プロセッサとI/Oノードが通信バスで分離されていることから、50kHz付近で最大速度に達します。シミュレーションの1回の時間ステップの間に、入力がサンプリングされ、データがプロセッサに転送され、結果がI/Oノードに戻されて出力が更新されます。PCIまたはPXIバスでは、通信の遅延時間は通常シミュレーション時間全体の4分の3を占めます。計算をFPGAに移行させることで計算自体は高速化しますが、速度向上の大部分は1つのデバイス上にプロセッサノードとI/Oノードを共同で配置することによるものなので、通信遅延時間はごくわすかとなります。
高度なモータ制御のリアルタイムシミュレーションでエンジニアが次に直面する難題は、モデルの精度とシミュレーション速度の適切な組み合わせをいかに実現するかです。機能レベルのHILテストを実施するならシンプルな定数パラメータや線形モデルで十分ですが、高度なモータ制御の耐久テストや最適化を行うにはより高精度なモデルが求められます。計算の複雑さを増すことなくシミュレーション精度を高める効果的な方法として、モデルパラメータをルックアップテーブルに置き換えて、それらのパラメータをシミュレーションの繰り返しごとに更新するという方法があります。
有限要素解析(FEA)の結果や実験的に得られたテーブルを使用すると、コギングトルクや磁気飽和など、複雑な非線形動作をシミュレーションすることができるため、これらの複雑な現象に適応できるコントローラの設計も可能となります。それぞれのケースで、シミュレーションで直接モデリングしなくても、ルックアップテーブルにより複雑な動作を捉えることができます。例えば図3に明確に示されるように、モータのインダクタンスは動作範囲内で4.5~12mHの変動があります。
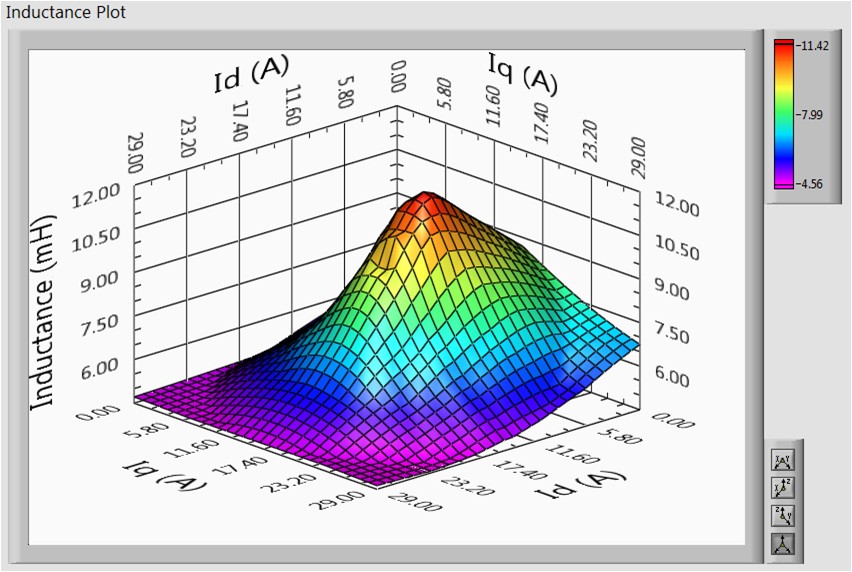
図3. 動作範囲におけるモータのD-Qインダクタンス値の曲面プロット
解決法
ナショナルインスツルメンツでは、ソフトウェアツールとハードウェアツールを組み合わせて、パワーエレクトロニクスや電気モータのリアルタイムテストに適した業界トップレベルのプラットフォームを提供しています。NI電気モータシミュレーションツールキットには、電気機械やインバータのモデルが含まれていますので、制御エンジニアはNIのリアルタイムテスト用ツールのエコシステムにそれらを組み込みテストシステムをすばやくセットアップすることができます。
NI電気モータシミュレーションツールキット
NI電気モータシミュレーションツールキットは、電気モータシステムのデスクトップおよびHIL(hardware-in-the-loop)シミュレーションを開発するためのモデリング要素を提供するものです。このツールキットを使用すると、電気シミュレーション、制御、HIL用のLabVIEWプロジェクトテンプレートや各種モータタイプのVeriStandアドオンが追加されます。モデルはホストコンピュータで実行してソフトウェアのみのシミュレーションを行うことができるほか、NI Real-Timeターゲット上で実行すれば従来型のHIL、NI FPGAターゲット上で実行すれば高速HILが実現できます。

図4. このセットアップは、電気モータのECU HILテストの一般的なソフトウェアとハードウェアの組み合わせを示しています。PXIベースの高精度シミュレータは、KGCのフロントエンドアダプタモジュールとともにFlexRIO FPGAボードを使用して、データはNI VeriStandで記録・表示しています。
ツールキットには、シンプルな線形近似またはJSOLのJMAG-RTモデルと統合できる高精度表現の、スイッチドリラクタンス(SR)および永久磁石同期機(PMSM)モータタイプのモデルが含まれています。有限要素解析(FEA)に基づくJMAG-RTモデルとのインタフェースにより、コギングトルクや磁気飽和などの非線形動作を正確にシミュレーションすることが可能となっています。
サポートするモータタイプ:
- 永久磁石同期機(PMSM)
- 定数パラメータモデル
- JMAG-RT FEAベースモデル
- スイッチドリラクタンスモータ(SRM)
- 線形モデル
- JMAG-RT FEAベースモデル
NI電気モータシミュレーションツールキットをダウンロードして評価する
JMAG-RTモデルを使用したHILで株式会社JSOLと提携
ナショナルインスツルメンツでは、株式会社JSOLと提携し、同社のFEAツール、JMAGとJMAG-RTから、NI LabVIEWシステム開発ソフトウェアもしくはNI VeriStandソフトウェア用に高精度モデルを生成して、リアルタイムテストアプリケーションを構成できるようになりました。この提携により、電気モータのテストとシミュレーションに必須の主要件への対応が可能となり、LabVIEW FPGAとNI RIO FPGAベースのハードウェアを使用して、マイクロ秒レベルのタイミングでFEAベースのモータモデルを実行することができます。モデル演算ではFEAが生成したルックアップテーブルを使用して、モータの現在の状態に基づきリアルタイムで参照することで、線形演算と非線形のルックアップテーブルを組み合わせ、極めて高速かつ高精度のシミュレーションを実現しています。
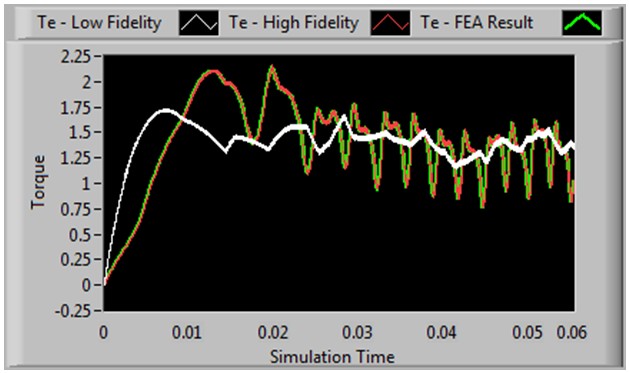
図5.定数パラメータD-Qモデル、オフラインのJMAG-FEAモデル、LabVIEW FPGAで実行するJMAG-RTモデルにより得られたトルク計算。D-Qモデルはトルクの平均値をシミュレーションしますが、JMAGおよびJMAG-RTモデルはトルクのリプルをより高精度でシミュレーションします。
高精度モデルを生成できる構成ベースのモデリングツール、JMAG-Expressをダウンロードして試してみることができます(無料)。
NI VeriStand
NI VeriStandは、リアルタイムテストアプリケーションを作成するための構成ベースのソフトウェア環境です。手元に届いたその日からすぐに、ターゲットからホストへのリアルタイム通信、データロギング、刺激生成、アラームの検出・応答などが行えます。またNI VeriStandは、シミュレーションのみのテストからHILテストまで短期間で移行でき、テストプロファイル、アラーム、手順、解析ルーチンといったテストコンポーネントを再利用することができます。モデルからハードウェアチャンネルへパラメータを簡単に再マッピングして、実世界I/Oを容易に実現できます。 このように簡単に移行できることで、回帰テストの実行にかかる時間を短縮できるほか、NI TestStandなどのテスト管理ソフトウェアを使用してテストを自動化することも可能となります。
NI VeriStandは、リアルタイムプラグイン経由でアプリケーションに特化した機能を作成できるオープンフレームワークを特徴としています。そのためテストシステムの柔軟性を最大限に高められます。NI電気モータシミュレーションツールキットを使用すると、構成可能な環境にモータのモデリング機能が追加され、デスクトップシミュレーション/テスト、従来型リアルタイムハードウェアプラットフォームでのリアルタイムシミュレーション/テスト、FPGA上での高速シミュレーションを実行できます。
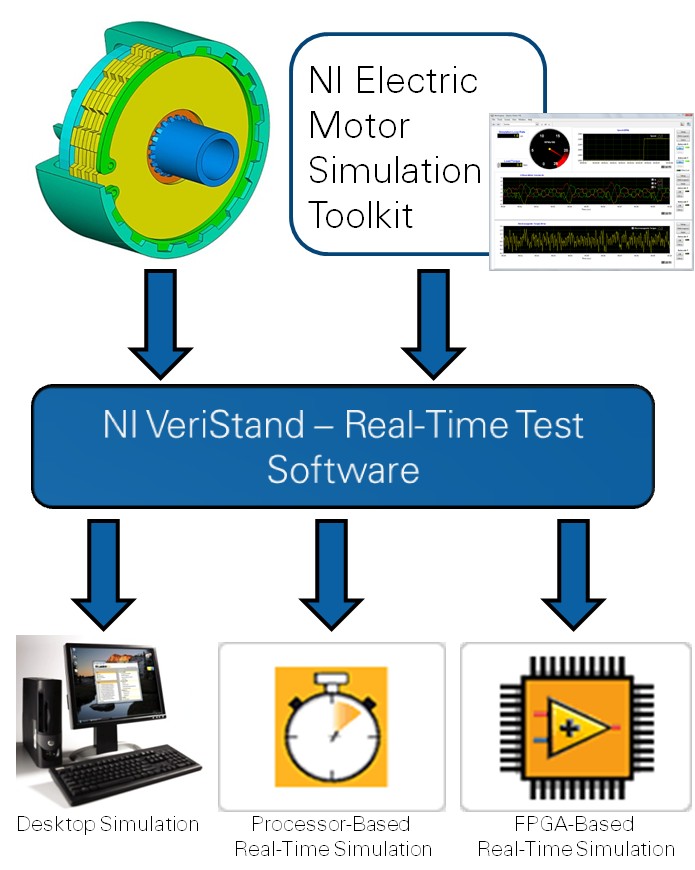
図6. NI VeriStandを使用すると、各種シミュレーションターゲットの様々な環境からモデルを実装することができます。
LabVIEW FPGA
FPGA(field-programmable gate array)とは、再プログラミングが可能なシリコンチップです。PCに搭載されているプロセッサと異なり、FPGAをプログラミングするとチップ自体が再配線されるため、ソフトウェアアプリケーションが実行されるのではなく指定の機能がハードウェアとして実装されます。初のFPGAは、Xilinx社の共同創立者であるRoss Freeman氏が1985年に開発しました。NIではXilinx社と提携して同社の最先端FPGA技術を様々なハードウェアプラットフォームで提供しており、LabVIEW FPGAを使用したグラフィカルプログラミングや浮動小数点演算を可能にしました。
その他の関連リソース
- ユーザインタビュー - PXIベースのHEV/EV向けHILSシステム ルネサスがモータ制御技術の先行開発に導入
- ユーザインタビュー- LabVIEW RIOアーキテクチャーを利用しハイブリッド車向けのモーターHILSを構築、 FPGAの高い演算性能とオープンアーキテクチャーが決め手に
- システムを購入、またはNI電気モータシミュレーションツールキットをダウンロード/評価
- 電力システムのシミュレーション、コントロールプロトタイピング/リアルタイムテスト向けのその他のソフトウェア/ハードウェアオプション
NI電気モータシミュレーションツールキットについてのお問い合わせは、salesjapan@ni.com
までお問い合わせください。